Nox Sensor Mercedes,Auto Parts Nox Sensor,Mercedes Benz Nox Sensor,Mercedes Nitrogen Oxide Sensor HangZhou Changchen Industrial Co.Ltd. , https://www.hzcc16.com
1, particle filter technology
Particle filter technology is a new tracking algorithm that implements Bayesian filtering. It can effectively deal with non-linear and non-Gaussian tracking problems. It can adapt to overlapping and occlusion conditions in complex environments and can simultaneously track multiple targets. Therefore, it is mostly used. In GPS tracking and other object tracking, personnel tracking. In RFID applications, reader readings are actually inaccurate data streams with non-deterministic semantics that track the location of tags in real time. RPFC is based on the above two points and uses non-deterministic strategies to clean RFID data. .
2, RPFC non-deterministic cleaning framework
For the unreliability and semantic uncertainty of RFID data, this paper proposes an RPFC non-deterministic cleaning framework. The RPFC non-deterministic data cleaning is divided into semantic cleaning and misreading and cleaning. Semantic cleaning mainly solves the problem of semantic non-determinism of RFID raw data, and obtains an effective probability value to express the non-deterministic nature of RFID data through cleaning. Misreading and cleaning mainly solves the problem of negative reading and positive reading of the reader, and ultimately provides a “clean†data table for the upper application.
2.1 Raw data semantic cleaning There is semantic uncertainty in the original RFID data, but the original data description does not express this non-determinism. To a certain extent, it can not reflect the actual situation of the application. To solve this problem, this paper carries out RFID raw data. Semantic cleaning.
2.1.1 Raw Data Semantic Purge Target Raw Data Triplet Descriptive Type For example, where R represents the identifier of the reader, O represents the identifier of the detected tag, and T represents the moment when the reader R detects the tag O.
The RPFC method cleans the original data semantically, converts the reader identifier R in the original reading into a specific application location information L of the tag O, and introduces a probability dimension P to indicate the possibility that the tag O is in a specific application position L. The data is represented by three. The tuple form becomes a quad.
2.1.2 Raw data semantic cleaning strategy The RPFC method uses a weighted particle set to track changes in the position of the label according to the particle filter process to obtain the probability distribution of the position of the label, that is, to obtain the non-deterministic representation of the RFID data and realize the raw data. Semantic cleansing. The specific semantic cleaning strategy of the RPFC method is as follows:
The first step: RPFC sampling, generated according to the position distribution of the tag at time t-1, the particle position conversion model p(Lt|Lt-1) and the particle motion model p(mt|et-1,factort-1) The new particle set St={Lit,wit|i=1,2,...,N}, where N is the number of particles in the particle set and wit=1/N.
The second step: RPFC importance sampling, when the reader generates a reading, according to the new reading T item to calculate particle concentration on the particle at the time T, and according to particle observation model p (zt | Lit) to the particle concentration The particle weighting value.
The third step: RPFC resampling, according to the second step to get the number of particles at each position and the weight of each particle, and the Bayesian formula (such as (1)) to calculate the probability distribution of the label, and according to the ratio Resampling to get a new particle set position distribution, from the straight line uniform motion formula to obtain the particle's motion pattern, and then set t = t + 1, go to the first step. Assuming that the particles are distributed at NL positions, the number of particles at each position Li is Ni, and the weight of the jth particle is wjt and equal to other particle weights at the same position, then the label position probability distribution P ( The formula for Lit|zt) is as in (2). 
2.2 Misreading Cleaning RFID readers have unreliable readings, mainly passive reading, active reading and redundant reading. The RPFC method reads two different types of misreading: negative reading and positive reading, and adopts different strategies. Definitive cleaning.
3, experimental environment and data analysis 3.1 experimental results analysis 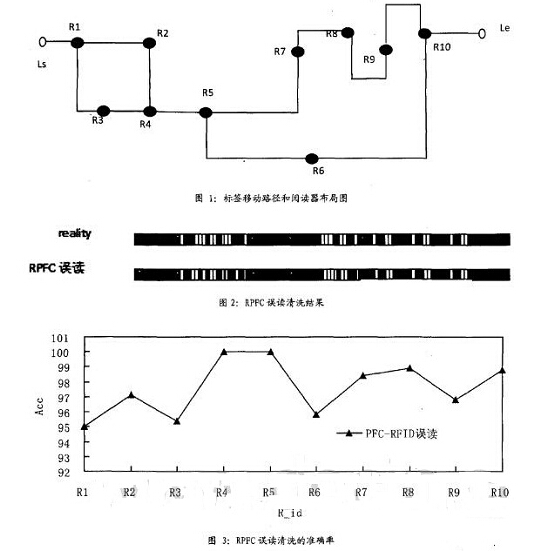
3.2 Accuracy Rate To determine the cleaning effect of the RFID data stream, we define: Accuracy ACC = Data equal to the true value after cleaning/N test data.
As can be seen from Figure 3, the RPFC method proposed in this paper uses the adjacent relationship between readers on a single label moving path to fill in negative data of neighboring readers, even if a certain reader reads data for a long time. The rates are low and the negative readings can be filled up with other reader readings, and the positive readings are hardly increased, limiting the error to a very small range.
4 Conclusion
This article has conducted in-depth research on RFID data cleaning technology and has mainly done the following work:
(1)a proposes an RFID data cleaning framework based on particle filtering, RPFC. The use of abstract particles simulates the actual movement of the mobile tag, obtains the positional state of the tag, and converts the raw data into a smooth non-deterministic data stream with respect to the location of the tag. In the RPFC, a non-deterministic cleaning strategy was proposed to clean the RFID data stream, resulting in a “clean†data table.
(2) In this paper, the characteristics of RFID mobile tags are studied, and the accuracy rate is used to measure the cleaning effect of tags.
Research on RFID Data Cleaning Method Based on Particle Filter
RFID (Radio Frequency Identification) technology is a non-contact automatic identification and data acquisition technology. This paper proposes a particle filter-based RFID data cleaning method RPFC (RFID-Particle Filter Cleaning), which transforms the raw data into a smooth probability data stream with respect to the location of the tag. It has higher sensitivity and will be better applied to mobile. label.